- Toggle switch : Switch ini memiliki dua posisi, on dan off, dan dapat dipindahkan dengan menekan tombol.
- Push button : Switch ini hanya aktif saat tombol ditekan dan kembali ke posisi semula saat tombol dilepas.
- Dip switch : Switch ini memiliki beberapa terminal yang dapat dihidupkan atau dimatikan dengan cara menggeser tuas kecil.
- Rotary switch : Switch ini memiliki kenop yang dapat diputar untuk memilih antara beberapa posisi yang berbeda.
- Lebih efisien : LED membutuhkan daya yang lebih kecil untuk menghasilkan cahaya yang sama dengan lampu pijar.
- Tahan lama : LED memiliki umur yang lebih panjang dibandingkan dengan lampu pijar.
- Mudah dikontrol : LED dapat dengan mudah dihidupkan, dimatikan, dan diredupkan menggunakan komponen elektronika lainnya.
- Ramah lingkungan : LED tidak mengandung merkuri atau zat berbahaya lainnya seperti lampu pijar
- Saklar lampu
- Remote control
- Indikator status
- Papan iklan
- Lampu dekoratif
- Traffic light
- Mengetahui komponen yang digunakan dalam membuat rangkaian pada modul 1 yang menggunakan switch sebagai inputan dan led sebagai output atau keluaran.
- Memahami dasar input dan output mikrokontroler.



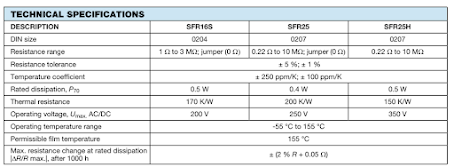
spesifikasi :


b. LED




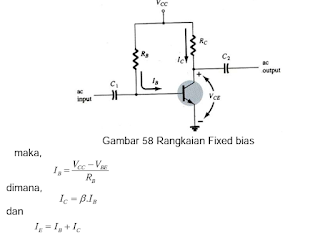
- Bi-Polar Transistor
- DC Current Gain (hFE) is 800 maximum
- Continuous Collector current (IC) is 100mA
- Emitter Base Voltage (VBE) is > 0.6V
- Base Current(IB) is 5mA maximum













- Memiliki EEPROM (Electrically Erasable Programmable Read Only Memory) sebesar 1KB sebagai tempat penyimpanan data semi permanen karena EEPROM tetap dapat menyimpan data meskipun catu daya dimatikan.
- Memiliki SRAM (Static Random Access Memory) sebesar 2KB.
- Memiliki pin I/O digital sebanyak 14 pin 6 diantaranya PWM (Pulse Width Modulation) output.
- 32 x 8-bit register serba guna.
- Dengan clock 16 MHz kecepatan mencapai 16 MIPS.
- 32 KB Flash memory dan pada arduino memiliki bootloader yang menggunakan 2 KB dari flash memori sebagai bootloader.
- 130 macam instruksi yang hampir semuanya dieksekusi dalam satu siklus clock.
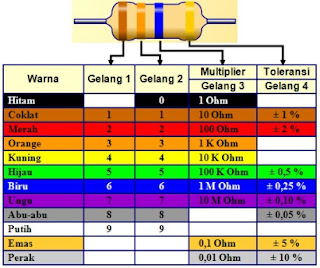






- Tegangan kerja / jatuh tegangan pada sebuah menurut warna yang dihasilkan:
- Infra merah : 1,6 V
- Merah : 1,8 V – 2,1 V
- Oranye : 2,2 V
- Kuning : 2,4 V
- Hijau : 2,6 V
- Biru : 3,0 V – 3,5 V
- Putih : 3,0 – 3,6 V
- Ultraviolet : 3,5 V





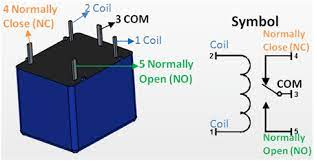
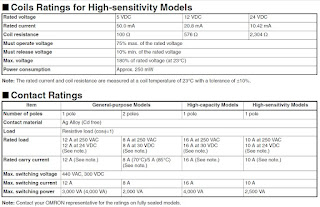
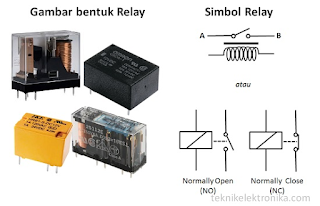
- Tegangan pemicu (tegangan kumparan) 5V
- Arus pemicu 70mA
- Beban maksimum AC 10A @ 250 / 125V
- Maksimum baban DC 10A @ 30 / 28V
- Switching maksimum


- pada rangkaian terdapat 3 sensor yaitu touch sensor, vibration sensor, dan magnetic sensor serta 1 mikrokontroller yaitu arduino uno, Sensor Magnet diletak dibawah brankas, sensor ini berfungsi untuk mendeteksi brankas berada ditempat seharusnya. Sensor akan berlogika 1 jika brankas berada pada tempatnya, dan apabila brankas diangkat dari tempatnya maka sensor magnet tidak akan mendeteksi magnet menyebabkan sensor magnet berlogika 0.
- Sensor Vibration diletakan di dalam brankas, sensor ini berfungsi untuk mendeteksi goncangan jika ada yang mencuri brankas. Sensor akan berlogika 1 jika mendeteksi goncangan atau pukulan menyebabkan output dari sensor ini berlogika 1
- Sensor Touch diletakan dibagian depan brankas, sensor ini berfungsi sebagai kunci dari brankas ini. Sensor akan berlogika 1 jika sesorang menyentuh dan memasukan sandi brankas menyebabkan output dari sensor ini berlogika 1
- switch yang terletak di pin 10 berfungsi untuk menghidupkan lampu/led yang disambung ke pin 5 arduino uno

int P = 13;
int G = 12;
int T = 8;
int W = 10;
int OW = 5;
int OP = 7;
int OG = 2;
int OT = 4;
int S1 = 0;
int S2 = 0;
int S3 = 0;
int S4 = 0;
void setup() {
pinMode (P, INPUT);
pinMode (G, INPUT);
pinMode (T, INPUT);
pinMode (W, INPUT);
pinMode (OW,
OUTPUT);
pinMode (OP,
OUTPUT);
pinMode (OG,
OUTPUT);
pinMode (OT,
OUTPUT);
Serial.begin(9600);//baudrate
}
void loop() {
S1 = digitalRead(P);
S2 = digitalRead(G);
S3 = digitalRead(T);
S4 = digitalRead(W);
if (S1 == 1
&& S2 == 0 && S3 == 0 && S4 == 0) {
digitalWrite(OP,
HIGH);
digitalWrite(OG,
LOW);
digitalWrite(OT,
LOW);
digitalWrite(OW,
LOW);
} else if (S1 == 1
&& S2 == 1 && S3 == 0 && S4 == 0) {
digitalWrite(OP,
HIGH);
digitalWrite(OG,
HIGH);
digitalWrite(OT,
LOW);
digitalWrite(OW,
LOW);
} else if (S1 == 0
&& S2 == 0 && S3 == 1 && S4 == 0) {
digitalWrite(OP,
LOW);
digitalWrite(OG,
LOW);
digitalWrite(OT,
HIGH);
digitalWrite(OW,
LOW);
} else if ((S1
&& S3) == 1 && (S2 && S4 == 0)) {
digitalWrite(OP,
HIGH);
digitalWrite(OG,
LOW);
digitalWrite(OT,
HIGH);
digitalWrite(OW,
LOW);
} else if ((S1
&& S2 && S3 && S4) == 1) {
digitalWrite(OP,
HIGH);
digitalWrite(OG,
HIGH);
digitalWrite(OT,
HIGH);
digitalWrite(OW,
HIGH);
} else if ((S1
&& S2 && S3) == 1 && (S4== 0)) {
digitalWrite(OP,
HIGH);
digitalWrite(OG,
HIGH);
digitalWrite(OT,
HIGH);
digitalWrite(OW,
LOW);
} else if ((S2
&& S3 && S4) == 1 && (S1 == 0)) {
digitalWrite(OP,
LOW);
digitalWrite(OG,
HIGH);
digitalWrite(OT,
HIGH);
digitalWrite(OW,
HIGH);
} else if ((S1
&& S2 && S4) == 1 && (S3 == 0)) {
digitalWrite(OP,
HIGH);
digitalWrite(OG,
HIGH);
digitalWrite(OT,
LOW);
digitalWrite(OW,
HIGH);
} else if ((S1
&& S3 && S4) == 1 && (S2 == 0)) {
digitalWrite(OP,
HIGH);
digitalWrite(OG,
LOW);
digitalWrite(OT,
HIGH);
digitalWrite(OW,
HIGH);
} else if ((S1
&& S4) == 1 && (S2
&& S3 == 0)) {
digitalWrite(OP,
HIGH);
digitalWrite(OG,
LOW);
digitalWrite(OT,
LOW);
digitalWrite(OW,
HIGH);
} else if ((S1
&& S4) == 0 && (S2
&& S3 == 1)) {
digitalWrite(OP,
LOW);
digitalWrite(OG,
HIGH);
digitalWrite(OT,
HIGH);
digitalWrite(OW,
LOW);
} else if ((S1
&& S3) == 0 && (S2
&& S4 == 1)) {
digitalWrite(OP,
LOW);
digitalWrite(OG,
HIGH);
digitalWrite(OT,
LOW);
digitalWrite(OW,
HIGH);
} else if ((S1
&& S3 && S4) == 0
&& (S2 == 1)) {
digitalWrite(OP,
LOW);
digitalWrite(OG,
HIGH);
digitalWrite(OT,
LOW);
digitalWrite(OW,
LOW);
} else if ((S1
&& S2) == 0 && (S3
&& S4 == 1)) {
digitalWrite(OP,
LOW);
digitalWrite(OG,
LOW);
digitalWrite(OT,
HIGH);
digitalWrite(OW,
HIGH);
} else if ((S1
&& S2 && S3) == 0
&& (S4 == 1)) {
digitalWrite(OP,
LOW);
digitalWrite(OG,
LOW);
digitalWrite(OT,
LOW);
digitalWrite(OW,
HIGH);
} else {
digitalWrite(OP,
LOW);
digitalWrite(OG,
LOW);
digitalWrite(OT,
LOW);
digitalWrite(OW,
LOW);
}
}
penjelasan program :
- int P = 13;: Mendeklarasikan pin P sebagai input dengan nilai 13.
- int G = 12;: Mendeklarasikan pin G sebagai input dengan nilai 12.
- int T = 8;: Mendeklarasikan pin T sebagai input dengan nilai 8.
- int W = 10;: Mendeklarasikan pin W sebagai input dengan nilai 10.
- int OW = 5;: Mendeklarasikan pin OW sebagai output dengan nilai 5.
- int OP = 7;: Mendeklarasikan pin OP sebagai output dengan nilai 7.
- int OG = 2;: Mendeklarasikan pin OG sebagai output dengan nilai 2.
- int OT = 4;: Mendeklarasikan pin OT sebagai output dengan nilai 4.
- int S1 = 0;: Mendeklarasikan variabel S1 sebagai integer dengan nilai awal 0.
- int S2 = 0;: Mendeklarasikan variabel S2 sebagai integer dengan nilai awal 0.
- int S3 = 0;: Mendeklarasikan variabel S3 sebagai integer dengan nilai awal 0.
- int S4 = 0;: Mendeklarasikan variabel S4 sebagai integer dengan nilai awal 0.
Setup:
- pinMode(P, INPUT);: Mengatur pin P sebagai input.
- pinMode(G, INPUT);: Mengatur pin G sebagai input.
- pinMode(T, INPUT);: Mengatur pin T sebagai input.
- pinMode(W, INPUT);: Mengatur pin W sebagai input.
- pinMode(OW, OUTPUT);: Mengatur pin OW sebagai output.
- pinMode(OP, OUTPUT);: Mengatur pin OP sebagai output.
- pinMode(OG, OUTPUT);: Mengatur pin OG sebagai output.
- pinMode(OT, OUTPUT);: Mengatur pin OT sebagai output.
- Serial.begin(9600);: Memulai serial komunikasi dengan baud rate 9600.
Loop:
- S1 = digitalRead(P);: Membaca nilai digital dari pin P dan menyimpannya dalam variabel S1.
- S2 = digitalRead(G);: Membaca nilai digital dari pin G dan menyimpannya dalam variabel S2.
- S3 = digitalRead(T);: Membaca nilai digital dari pin T dan menyimpannya dalam variabel S3.
- S4 = digitalRead(W);: Membaca nilai digital dari pin W dan menyimpannya dalam variabel S4.
Kondisi:
- Program ini menggunakan serangkaian kondisi untuk menentukan output pada pin OW, OP, OG, dan OT.
- Setiap kondisi memeriksa nilai variabel S1, S2, S3, dan S4.
- Berdasarkan kombinasi nilai 1 dan 0 pada variabel tersebut, program menentukan output yang sesuai pada masing-masing pin.
- Jika kondisi tidak terpenuhi, maka semua pin diset ke LOW.
Output:
- Pin OW, OP, OG, dan OT dikontrol oleh program ini berdasarkan kondisi yang ditentukan.
- Output pada pin-pin tersebut dapat berupa HIGH atau LOW.
- Download HMTL klik disini
- Download kodingan arduino klik disini
- Download Simulasi Rangkaian klik disini
- Download Video Membuat Rangkaian klik disini
- Download Datasheet LED klik disini
- Download Datasheet Switch klik disini
- Download Data Sheet Resistor klik disini
- Download Data Sheet Dioda 1N4001 klik disini
- Download Data Sheet Transistor NPN BC547 klik disini
- Download Data Sheet Relay klik disini
- Download Data sheet Touch Sensor klik disini
- Download Data sheet Vibration Sensor klik disini
- Download Data sheet Magnetic Sensor klik disini
- Download File Library Touch Sensor klik disini
- Download File Library Vibration Sensor klik disini
- Download File Library Magnetic Sensor klik disini
Tidak ada komentar:
Posting Komentar